提示:阅读本文需要一定的深度学习基础。
课程链接:https://www.bilibili.com/video/BV1LE411G7Xj
我以前的强化学习笔记,相同的内容在下面就不再赘述:
1、强化学习概述
2、强化学习实践教学
Foundation
Overview
这部分内容可以参考我《强化学习概述》的序章。
强化学习的特征可以概括为以下几点:
- 需要通过在环境中探索来获取对环境的理解。
- Agent在环境中获得的奖励是延迟的,在获取奖励的过程中,由于没有反馈,你不知道自己每一步是对是错,优化这个过程是我们需要做的。
- 时间关联性,获取的数据都是有时间关联的,会使训练非常不稳定。
- Agent的行为会影响随后的到的数据。
- Agent的任务是让奖励最大化。
强化学习包含以下几个组成部分:
- 行为策略:也就是决定自己行为的函数,通常可以由神经网络来担任。
- 价值函数:对自己现在所处的状态进行价值的评估。可以对后面的收益带来多大的影响。
- 模型:决定了这个世界的运行方式。通过agent当前的状态的行为决定下一个状态,以及可以得到多大的奖励。
当有了行为策略,价值函数和世界模型之后,这三个成分就形成了一个马尔科夫决策过程(MDPs)。这个过程可视化了状态转移和我们采取的行为。
基于agent学习方式不同,我们可以分成两类:
- 基于价值(Value-based):依靠价值函数进行学习和决策。
- 基于策略(Policy-based):无需构建价值函数,输入状态就可以直接得到下一步动作的概率分布。
- Actor-Critic:这是上面两者的结合。既有策略函数(Actor),也有价值函数(Critic)。Actor的任务是对外输出动作并且根据Critic的打分来调整自己的参数来获得更好的输出,使得Critic打分更高。Critic的任务是对Actor的输出做评估(预测),并且通过reward不断调整自己的预测能可能地接近reward。这也就是一个Q网络。
基于agent有没有学习环境的模型进行分类:
- 基于模型(Model-based):知道环境的模型,通过学习状态转移采取措施。
- 无模型(Model-free):没有环境的模型,通过学习Value Function和Policy Function进行决策。
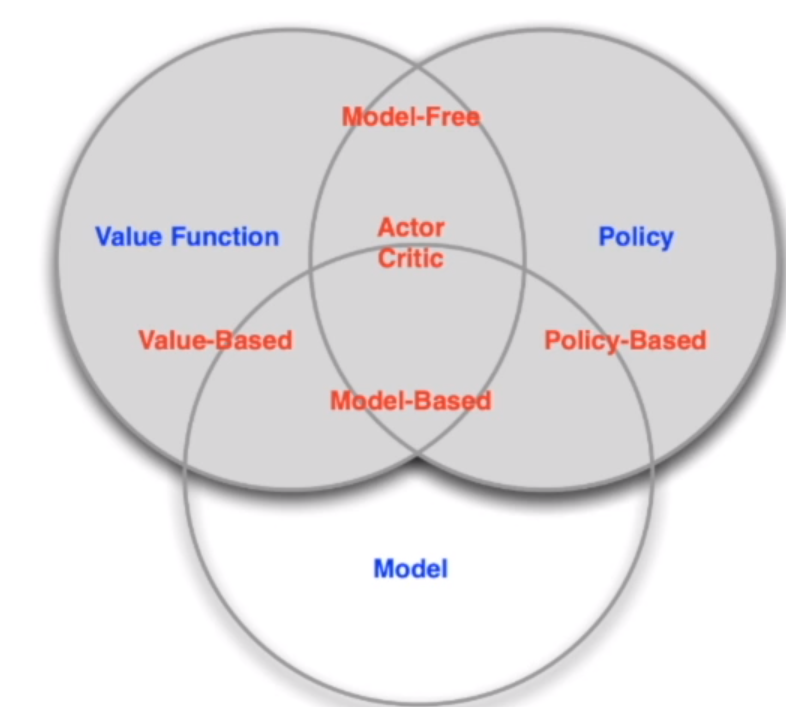
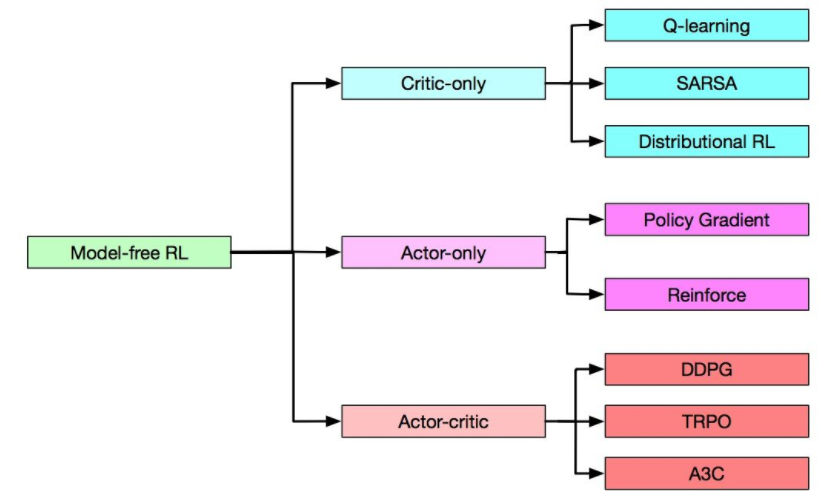
在model-free领域又有三种分类:
强化学习的Exploration和Exploitation:
这是两个很核心的问题,其中Exploration探讨怎么探索环境,尝试不同的行为,期望得到一个最佳的策略。Exploitation探讨不去尝试新的东西,用已知的内容做最好的决策。
Markov Decision Process(MDP)

马尔科夫决策过程是强化学习的基本框架。而Agent和Environment的交互过程,是可以用马尔科夫决策过程表示。其中,环境是全部可以观测的,部分观测问题也可以转换为MDP问题。
一个状态转移符合马尔科夫,意思是下一个状态取决于当前状态,和之前的状态没有关系。
描述状态转移概率,我们可以用状态转移矩阵表示:
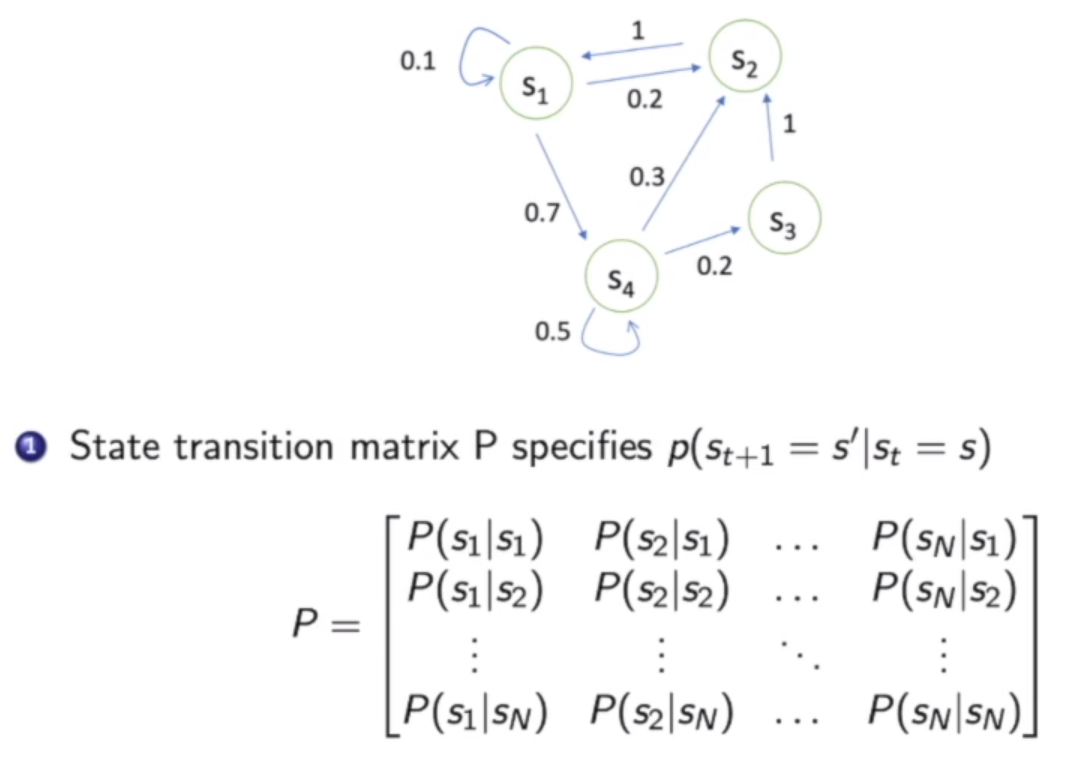
马尔科夫链 Markov Chain / Markov Process(MP)
马尔科夫链可以表示所有的状态转移概率:
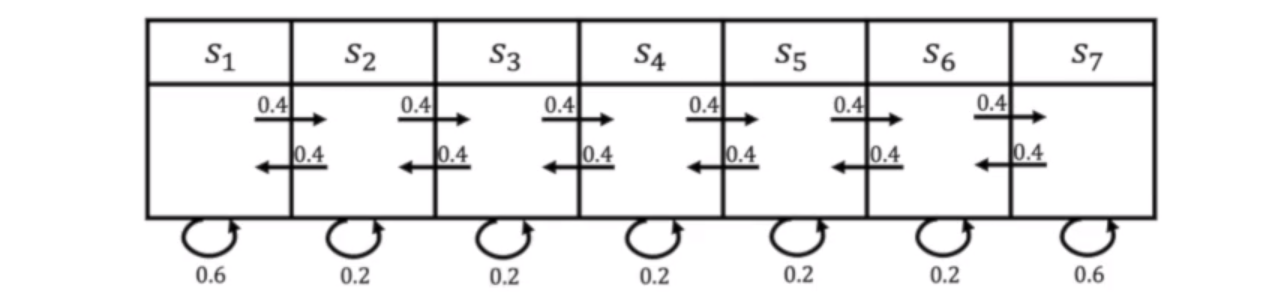
通过对马尔科夫链进行采样,我们可以得到很多从一个起始点开始的一串的轨迹。
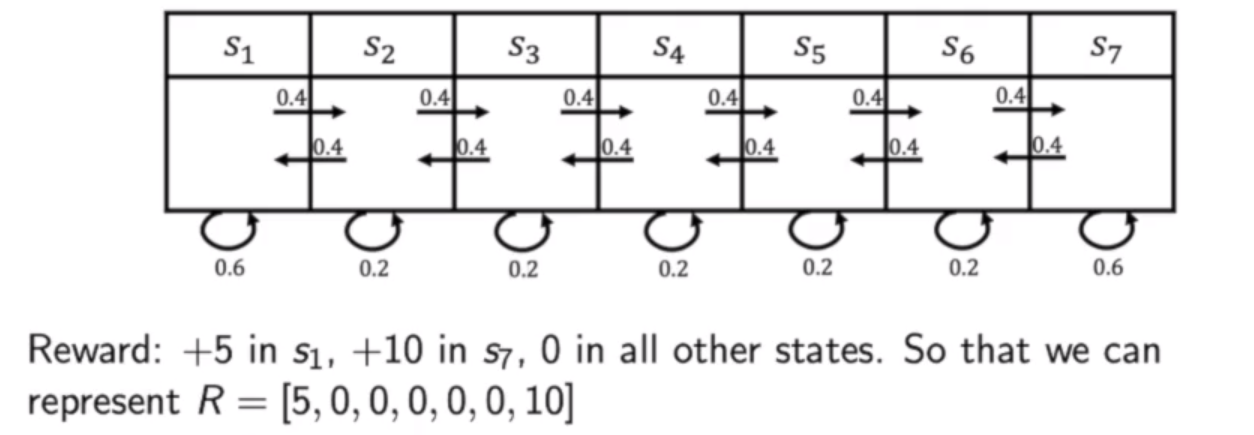
马尔科夫奖励过程 Markov Reward Process(MRP)
马尔科夫奖励过程是一个马尔科夫链加上奖励函数。在马尔科夫链中加入奖励函数,奖励函数是一个期望,表示到达某一个状态时可以获得多大的奖励。
Return and Value Funciton
Horizon
轨迹的长度是由有限个步数决定的。
Return
我们把奖励reward按照一定折扣相加得到。
$$
G_t = R_{t+1} + \gamma R_{t+2} + \gamma^2 R_{t+2} + \gamma^3 R_{t+3} + … + \gamma^{T-t-1} R_{T}
$$
State Value Function for a MRP
$$
V_t(s) = E[G_t|s_t = s] = E[R_{t+1} + \gamma R_{t+2} + \gamma^2 R_{t+2} + \gamma^3 R_{t+3} + \gamma^{T-t-1} R_{T} | s_t = s]
$$
也就是说,一个状态的价值由后面的状态可以得到的reward按一定系数叠加得到,越往后的reward,对当前状态的价值影响越小。
MRP价值函数满足以下贝尔曼等式(Bellman equation):
$$
V(s) = R(s) + \gamma \sum_{s’ \in S} P(s’|s) V(s’)
$$
也就是说现在状态的价值V(s)和现在的奖励以及下一个所有可能到达的状态的价值V(s’)相关。用矩阵表示:
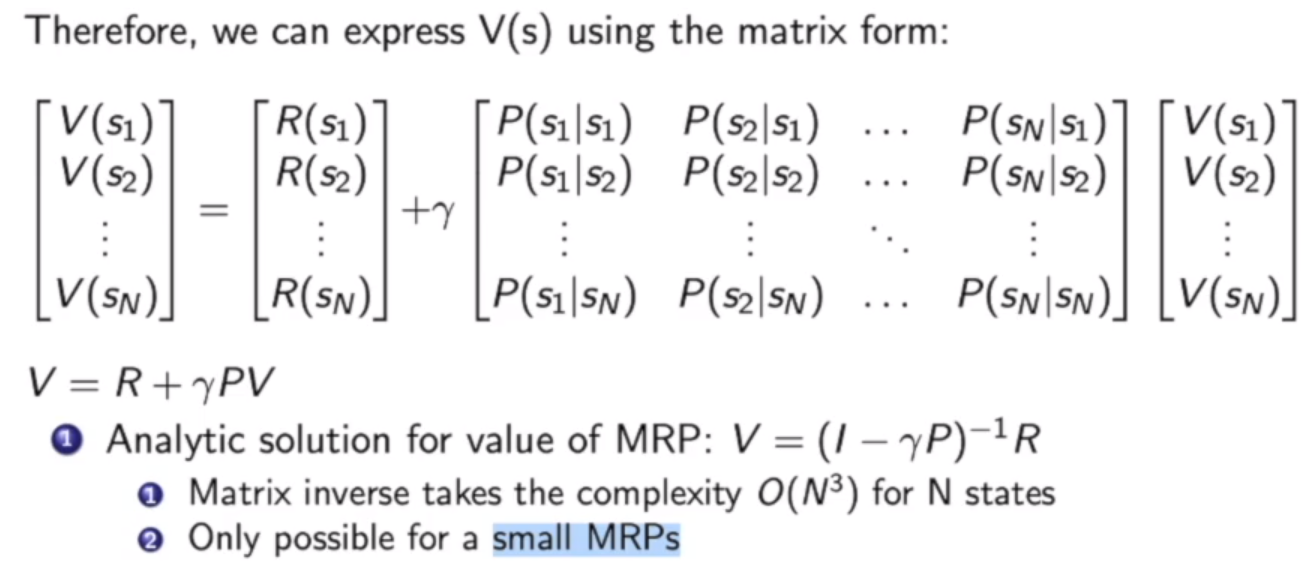
在状态转移矩阵较小的情况下,我们可以通过直接求逆矩阵就可以得出每一个状态的价值。
MRP价值的解法
- 第一种解法是动态规划(Dynamic Programming)
- 第二种解法是蒙泰卡罗评估(Monte-Carlo evaluation)
- 第三种解法是时序差分(Temporal-Difference Learning)
Monte Carlo Algorithm
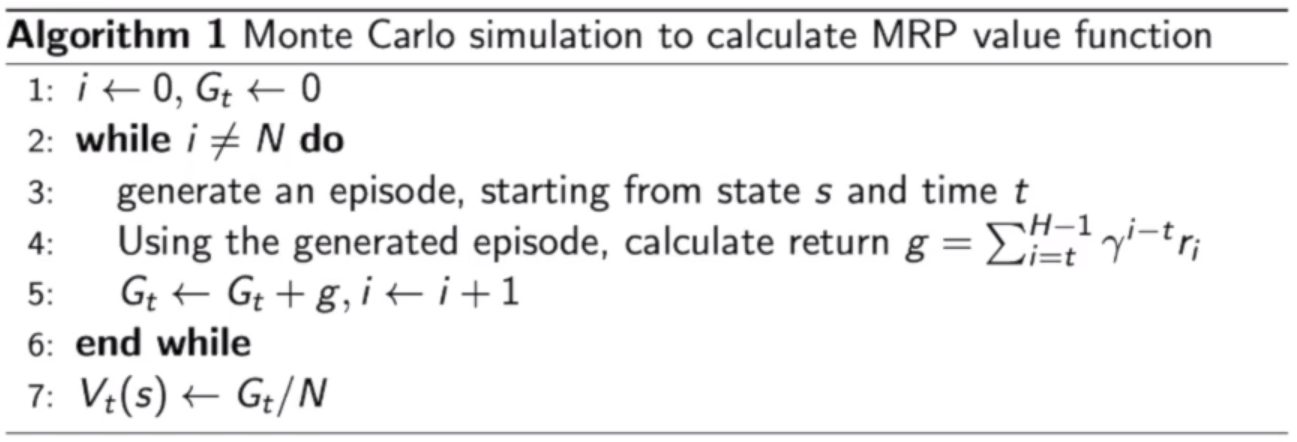
蒙泰卡罗算法的做法是直接在某状态开始直接收集多条轨迹的数据,得到多个价值,然后把所有的价值平均起来得到该状态的价值$V_t(s)$,可以说随机的数量足够多,那么$V_t(s)$就会接近真实的价值。
Iterative Algorithm

动态规划的办法是一直迭代Bellman Equation。当迭代到价值稳定时(变化小于某一个值),我们就可以直接输出V(s)。但是我们需要知道状态转移概率。这是一个model-based的方法。
Temporal-Difference Learning
这是前两者的结合。在后面会提到。
马尔科夫决策过程(Markov Decision Process)(MDP)
马尔科夫决策过程比马尔科夫奖励过程多了一个行为(action)。
未来的状态不仅取决于现在的状态,也取决于你所采取的行动。
奖励函数的设置不仅和当前状态有关,和行为也有关。
Policy in MDP

Policy函数决定了在某一个状态中采取的行为,可以输出一个行为的概率(离散控制),也可以是一个连续值(确定动作的连续控制)。而且假设Policy是静态的,也就是说具有时间独立性,不同时间的策略函数不变。
当我们知道MDP和policy π的时候,我们可以把MDP转换为MRP。
$$
P^π(s’|s) = \sum_{a\in A} π(a|s) P(s’|s,a)
$$
也就是说,一个状态转移到另一个状态的概率的计算方式是:Policy可控的决策过程的采取该动作概率 乘上 不可控的该动作下环境选择下一个状态的概率,然后把每个行动的可能性都相加。
奖励函数的计算方式也是分行动的,因为每个行动的reward都不相同:
$$
R^π(s) = \sum_{a \in A} π(a|s) R(s,a)
$$
Value Function for MDP
MDP的价值函数分为状态价值(state-value)和行为价值(action-value)。状态价值由当前的状态决定,而行为价值由当前状态和行动共同决定。有多少行为就有多少行为价值。
状态价值$v^{π}(s)$和行为价值$q^{π}(s)$的关系是:
$$
v^{π}(s) = \sum_{a \in A} π(a|s) q^{π}(s,a)
$$
也就是说状态价值由行为价值按照一定的比例构成。
因此贝尔曼等式有两条,也称Bellman Expection Equation:
$$
v^π (s) = E_{π} [R_{t+1} + \gamma v^{π} (s_{t+1}) | s_t = s]
$$
$$
q^π (s,a) = E_{π} [R_{t+1} + \gamma q^{π} (s_{t+1},A_{t+1}) | s_t = s ,A_t = a]
$$
这两个公式将是写代码更新参数的重点!!!尤其是行为价值公式!
容易得出行为价值公式有:
$$
q^π (s,a) = R_{s}^a + \gamma \sum_{s’ \in S} P(s’|s ,a)v^π(s’)
$$
联立
$$
v^{π}(s) = \sum_{a \in A} π(a|s) q^{π}(s,a)
$$
可以得出:
$$
v^{π}(s) = \sum_{a \in A} π(a|s) ( R_{s}^a + \gamma \sum_{s’ \in S} P(s’|s ,a)v^π(s’))
$$
$$
q^π (s,a) = R_{s}^a + \gamma \sum_{s’ \in S} P(s’|s ,a) \sum_{a \in A} π(a’|s’) q^{π}(s’,a’)
$$
这就是上一个节点与下一个相同属性节点价值之间的关系,使用于知道环境模型的情况下。也就是model-based。
Policy Evaluation
简单的说是计算$v^π(s)$,也叫做价值预测。用这个预测来指导我们的动作选择。
Prediction and Control
预测和控制是MDP的核心问题。
预测:给定MDP<S,A,P,R,γ>和policy π,或者给定MRP$<S,P^π,R^π,γ>$,我们可以对状态价值V进行计算。
控制:给定MDP,寻找最佳的价值函数V和最佳策略π。最佳指的是找π使得V最大。
Dynamic Programming
这两个问题都可以通过动态规划(Dynamic Programming)解决。只要我们可以把问题分解成一个个最优子结构,把子结构解出来,就可以组成一个最优解。我们可以把问题分解成递归的结构,因为状态相连,子状态得到一个值,未来状态也能推算出来,价值函数也就能储存和重用最优解。

或者用MRP公式也能迭代:
$$
v_{t+1} (s) = R^{π}(s) + \gamma P^π (s’|s ,a)v_t(s’)
$$
Find Optimal Policy(重中之重,反复查看)
当我们采取的策略π可以使得行为价值q最大化,那么这个策略就是最佳策略。寻找最佳策略的过程也叫MDP Control。
这里有两种解最佳策略的方法,一种是Policy iteration,一种是value iteration。这两个方法都是model-based的。
policy iteration:
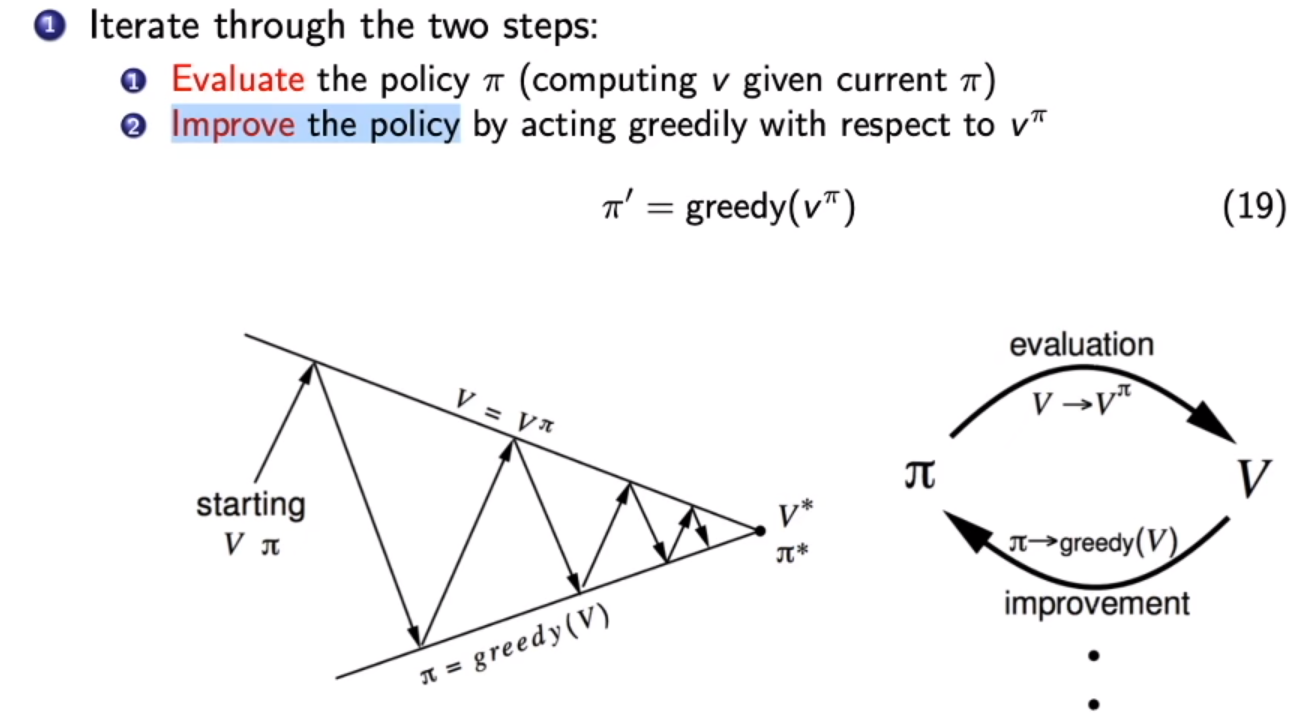
- 随机选择一个策略作为初始值。
- Policy Evaluation:通过现有的策略π计算状态价值v。
- Policy Improvement:计算当前最好的Action,更新策略$π(s) = argmax_a \sum_{s’,r}(r+\gamma V(s’))$。
- 不断循环第二和第三步。
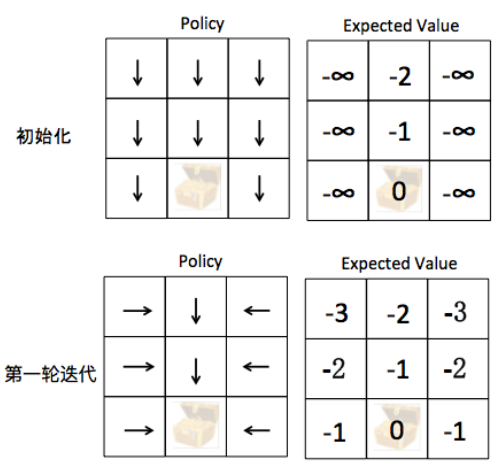
策略评估会评估从上次策略改进中获得的贪心策略的价值函数 V。另一方面,策略改进通过使每个状态的 V 值最大化的动作来更新策略。更新方程以贝尔曼方程为基础。它不断迭代直到收敛。
优化过后,贝尔曼最优等式(Bellman Optimality Equation)满足:
$$
v^{π}(s) = \max_{a \in A} q^π (s,a)
$$
之前的两条公式变为:
$$
v^*(s) = \max_aR(s,a) + \gamma \sum_{s’ \in S} P(s’|s ,a)v^*(s’)
$$
$$
q^* (s,a) = R(s,a) + \gamma \sum_{s’ \in S} P(s’|s ,a) \max_{a’} q^*(s’,a’)
$$
Q-learning就是基于贝尔曼最优等式实现的。
def policy_iteration(env, gamma = 1.0):
""" Policy-Iteration algorithm """
policy = np.random.choice(env.env.nA, size=(env.env.nS)) # initialize a random policy
max_iterations = 200000
gamma = 1.0
for i in range(max_iterations):
old_policy_v = compute_policy_v(env, policy, gamma)
new_policy = extract_policy(old_policy_v, gamma)
if (np.all(policy == new_policy)):
print ('Policy-Iteration converged at step %d.' %(i+1))
break
policy = new_policy
return policyValue Iteration:
在Policy Iteration中
- 第一步 Policy Evaluation:一直迭代至收敛,获得准确的V(s)
- 第二步 Policy Improvement:根据准确的V(s),求解最好的Action
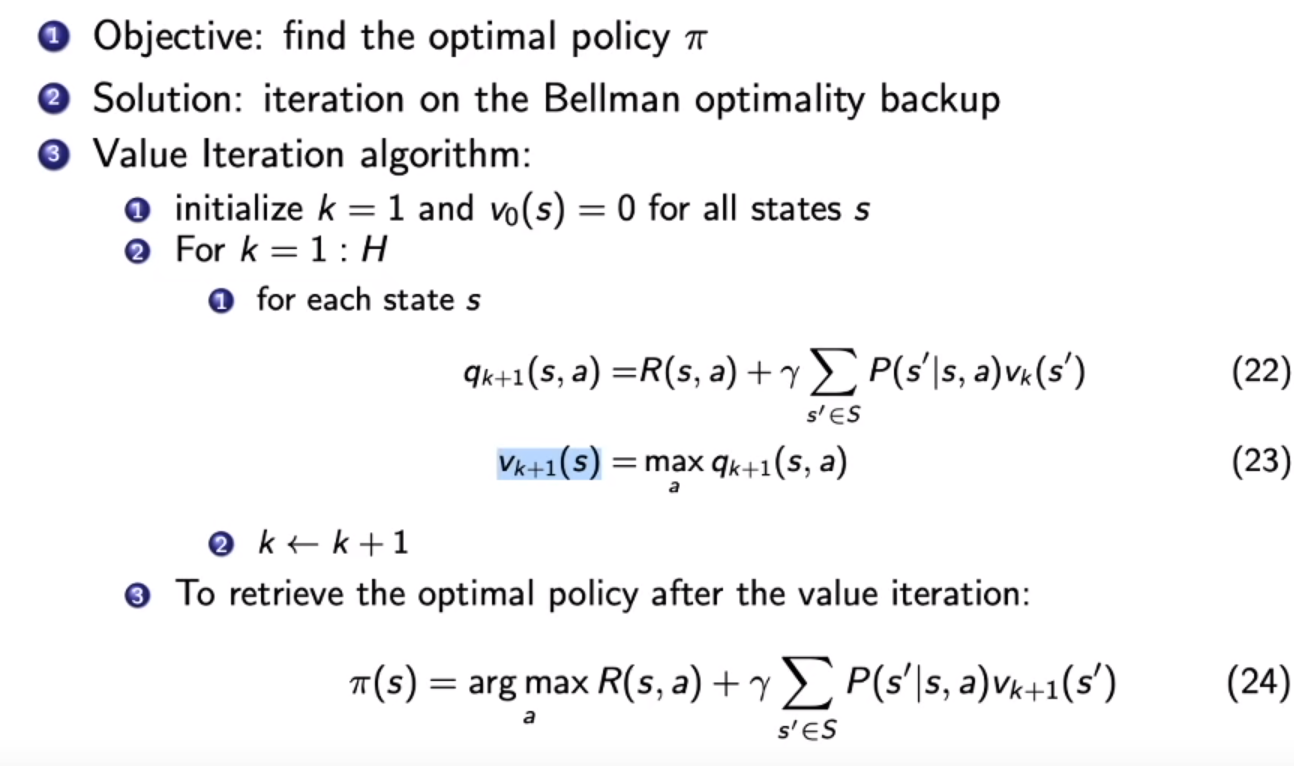
对比之下,在Value Iteration中
- 第一步 “Policy Eval”:迭代只做一步,获得不太准确的V(s)
- 第二步 “Policy Improvement”:根据不太准确的V(s),求解最好的Action
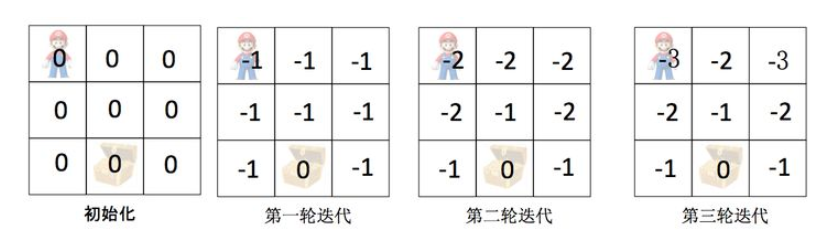
Value Iteration的迭代出optimal value function后只做一次policy update,即:循环(对于当前状态每个可能的action,都做一次value evaluation,然后取最大的value,作为当前状态的价值),直到收敛。最后,按照最优价值的转移方向更新一次策略。
这里把贝尔曼最优等式拿进来,寻找最佳的Value-Funciton,没有Policy Function在里面。
$$
v^*(s) \leftarrow \max_{a \in A}(R(s,a) + \gamma \sum_{s’ \in S} P(s’|s ,a)v^*(s’))
$$
def value_iteration(env, gamma = 1.0):
""" Value-iteration algorithm """
v = np.zeros(env.env.nS) # initialize value-function
max_iterations = 100000
eps = 1e-20
for i in range(max_iterations):
prev_v = np.copy(v)
for s in range(env.env.nS):
q_sa = [sum([p*(r + gamma * prev_v[s_]) for p, s_, r, _ in env.env.P[s][a]]) for a in range(env.env.nA)]
v[s] = max(q_sa)
if (np.sum(np.fabs(prev_v - v)) <= eps):
print ('Value-iteration converged at iteration# %d.' %(i+1))
break
return vModel-free Prediction and Control
Model-free下的价值估计
Model-free相对于model-based的不同在于是否知道MDP。而现实中大部分MDP都没有现成的模型可以用,所以我们只能采用Model-free的方法。
MDP已知:奖励函数R和转移矩阵P都可以为agent所知。所有agent才能通过Policy Iteration和Policy Iteration来寻找最佳策略。
在Model-free RL中,我们并没有直接获取转移状态和奖励函数,我们让agent跟环境进行交互,采集很多轨迹数据,agent需要从这些轨迹中获取信息,改进策略,以获得更多奖励。
当我们给定策略的时候,在没有给MDP转移模型的情况如何估计一个状态的价值?有两种常见的方法。一种是蒙泰卡罗(Monte Carlo policy evalution),一种是时序差分学习(Temporal Difference)
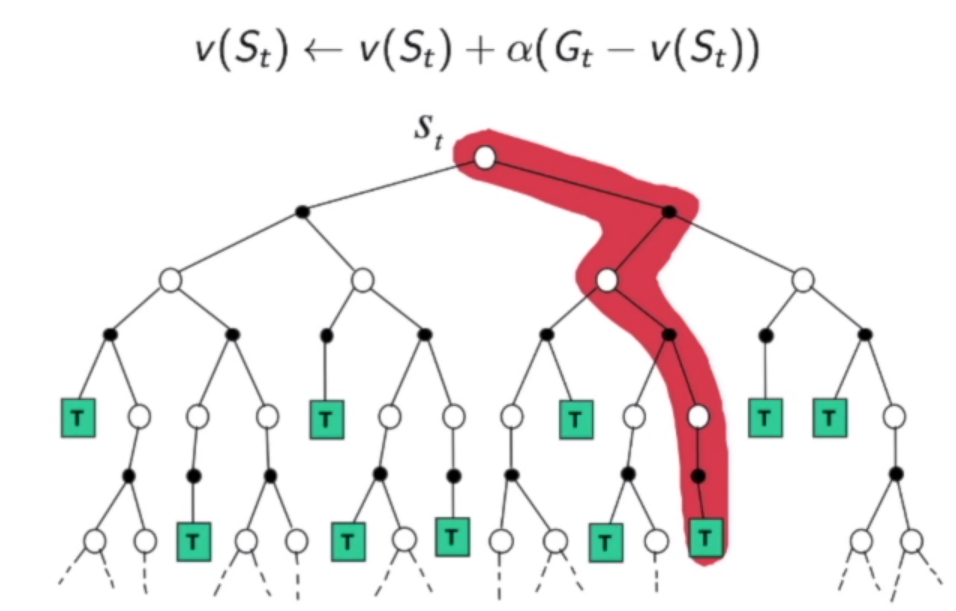
Monte-Carlo Policy Evaluation
蒙泰卡罗算法的做法是直接在某状态开始直接收集多条轨迹的数据,得到多个价值,然后把所有的价值平均起来得到该状态的价值$V_t(s)$,可以说随机的数量足够多,那么$V_t(s)$就会接近真实的价值。但这个算法的限制是只能用在有终止的马尔科夫决策过程。相对于动态规划(DP)来说,这是一个model-free的算法,而且只更新轨迹上的数据,速度较快。特点是需要跑完一个episode才能更新一次。
$$
v(S_t) \leftarrow v(S_t) + \alpha(G_{i,t} - v(S_t))
$$
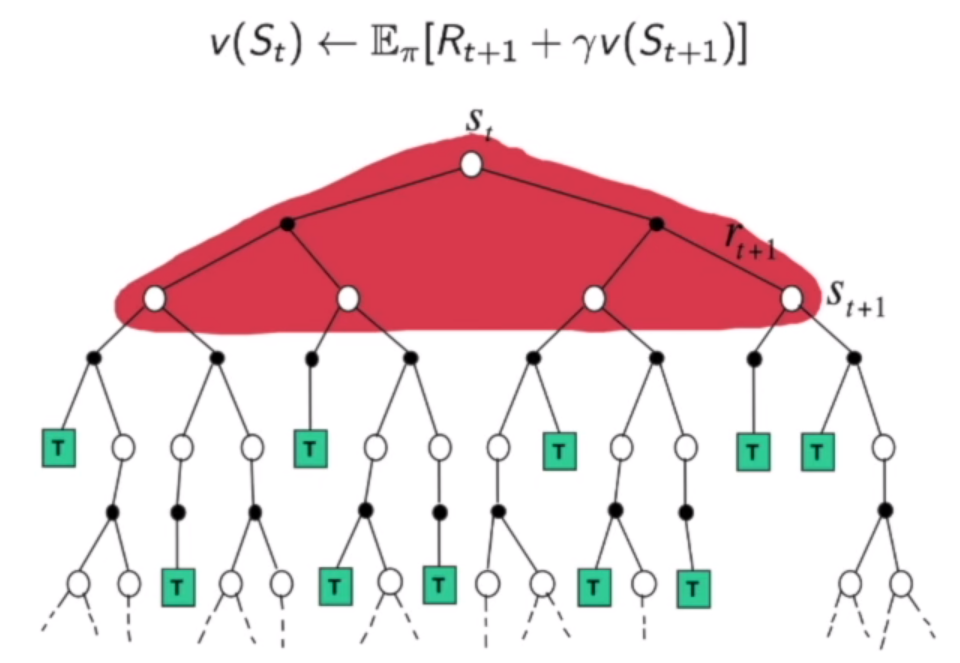
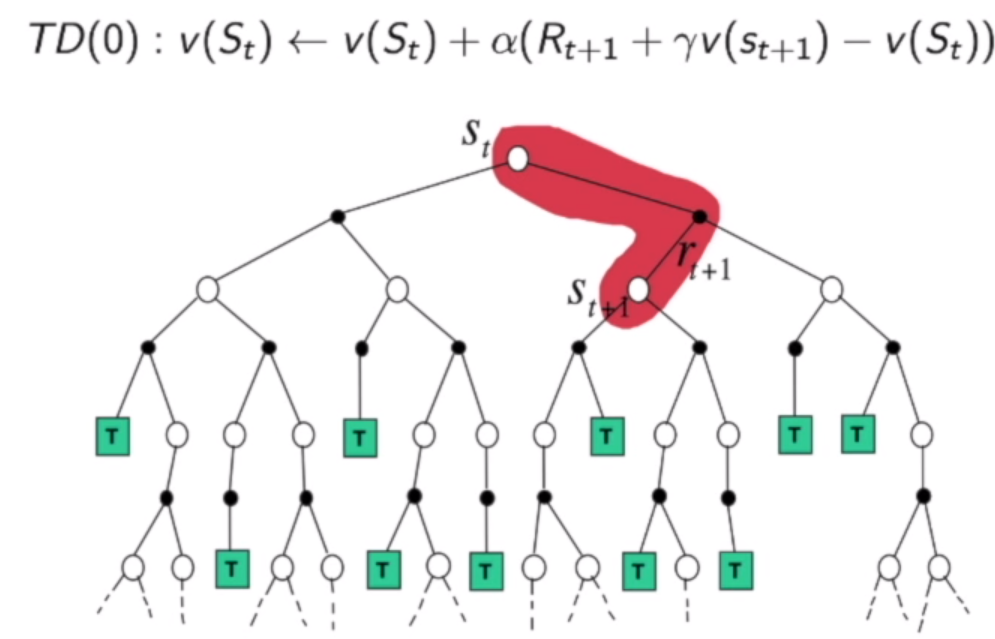
Temporal-Difference(TD)Learning
这是一个介于MC和DP之间的方法。这既可以用于Model-free,也能在一个episode不完整的情况下实现更新,一个step就能更新一次,每次只更新一点。
$$
v(S_t) \leftarrow v(S_t) + \alpha(R_{t+1} + \gamma v(S_{t+1}) - v(S_t))
$$
这个算法可以拓展到2-step TD,3-step TD等等,每两个或三个step或更多step更新一次。当这个步数为无穷时,TD算法就可以转变为MC算法,这就是它们的联系。
各种算法直接的区别
对于动态规划,需要考虑到所有支路的情况,取一个期望。
对于MC,我们每次只取一条路径来进行更新,期望通过多条路径的更新达到和期望一样的效果。
对于TD,每次还是走一条路径,一个step就更新一次。
model-free下的策略更新
通常我们希望每个状态都能得到充分的更新,因此我们需要尽可能采样到比较多的状态。通过MC采样的方法我们需要采样尽可能多的轨迹,然后更新一个Q表格。同样我们用TD可以保证每个step进行更新,不用等episode结束。
我们需要保证算法有足够多的探索,因此我们在刚开始迭代的时候让算法有较大的概率随机采取action,而不是按照greedy也就是动作价值最大的策略,在后面再把这个概率降下来。
Sarsa
更新公式
$$
Q(S_t,A_t) \leftarrow Q(S_t,A_t) + \alpha [R_{t+1} + \gamma Q(S_{t+1},A_{t+1}) - Q(S_{t},A_t)]
$$
其中α是学习率,我们每一个step需要更新Q表格中的一个值,更新完后使用greedy的策略进行探索,也有一定的概率随机探索,这是基于离散或有限状态的方法,是表格型的方法,没有用到神经网络。
# 学习方法,也就是更新Q-table的方法,采用Sarsa算法来更新Q表格
def learn(self, obs, action, reward, next_obs, next_action, done):
""" on-policy
obs: 交互前的obs, s_t
action: 本次交互选择的action, a_t
reward: 本次动作获得的奖励r
next_obs: 本次交互后的obs, s_t+1
next_action: 根据当前Q表格, 针对next_obs会选择的动作, a_t+1
done: episode是否结束
"""
predict_Q = self.Q[obs, action]
if done:
target_Q = reward # 没有下一个状态了
else:
target_Q = reward + self.gamma * self.Q[next_obs,
next_action] # Sarsa
self.Q[obs, action] += self.lr * (target_Q - predict_Q) # 修正qon-policy和off-policy
上面的算法Sarsa是一种on-policy的算法,也就是说探索和决策都采用同一种策略,而off-policy的算法是探索和决策采用不同的策略,这样我们在探索的时候就能使用更为激进的手段收集更多的数据,然后交给策略进行学习,这样也能比较有效利用到之前采集的数据。下面就讲一下off-policy中的Q-learning。
Q-learning
更新公式:
$$
Q(S_t,A_t) \leftarrow Q(S_t,A_t) + \alpha [R_{t+1} + \gamma \max_a Q(S_{t+1},a) - Q(S_{t},A_t)]
$$
可以看到,和Sarsa不同的地方在于我们没有用到第二个action,也就是说,我们无需知道下一个状态之后agent需要采取的动作。我们只需要从下一个状态采取的所有动作中选取动作价值最大的action的值来进行更新。因此更新用的第二个action和探索用的第二个action无关,这就是off-policy。Q-Learning的另一个特点是一个动作价值不会被隔壁的动作价值所影响,只取决于隔壁最大的动作价值。除了价值更新方法的不同,探索的策略依旧和Sarsa相同,这样Q-learning采取的策略就会比Sarsa激进得多。往往Q-learning会学习到最佳的策略。
def learn(self, obs, action, reward, next_obs, done):
""" off-policy
obs: 交互前的obs, s_t
action: 本次交互选择的action, a_t
reward: 本次动作获得的奖励r
next_obs: 本次交互后的obs, s_t+1
done: episode是否结束
"""
predict_Q = self.Q[obs, action]
if done:
target_Q = reward # 没有下一个状态了
else:
target_Q = reward + self.gamma * np.max(
self.Q[next_obs, :]) # Q-learning
self.Q[obs, action] += self.lr * (target_Q - predict_Q) # 修正qValue Function Approximation
这部分内容我以前有过记录:强化学习实战,请查看利用神经网络方法求解RL的章节。其中的DQN算法是一个经典算法。
Deep Q Networks
Code of DQN in PyTorch:https://github.com/cuhkrlcourse/DeepRL-Tutorials/blob/master/01.DQN.ipynb
Code of Flappy Bird:https://github.com/xmfbit/DQN-FlappyBird
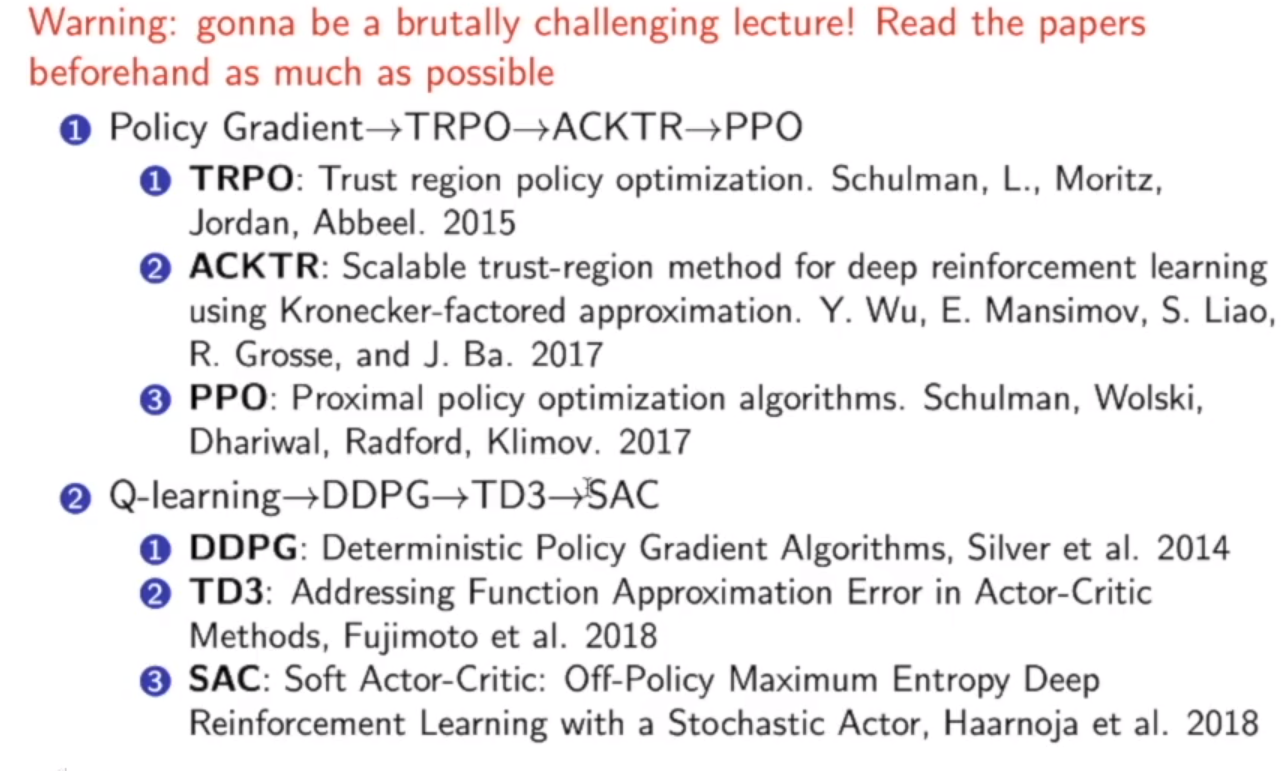
Policy Optimization:State of the Art
之前讲解的算法都是基于value-based的算法,利用各种方法来调整动作价值的更新,依靠这个价值来进行决策。下面来讲解policy-based的算法,这种算法无需构建价值函数,输入状态就可以直接由网络输出得到下一步动作的概率分布。此部分内容可以参考强化学习实战的基于策略梯度求解RL。
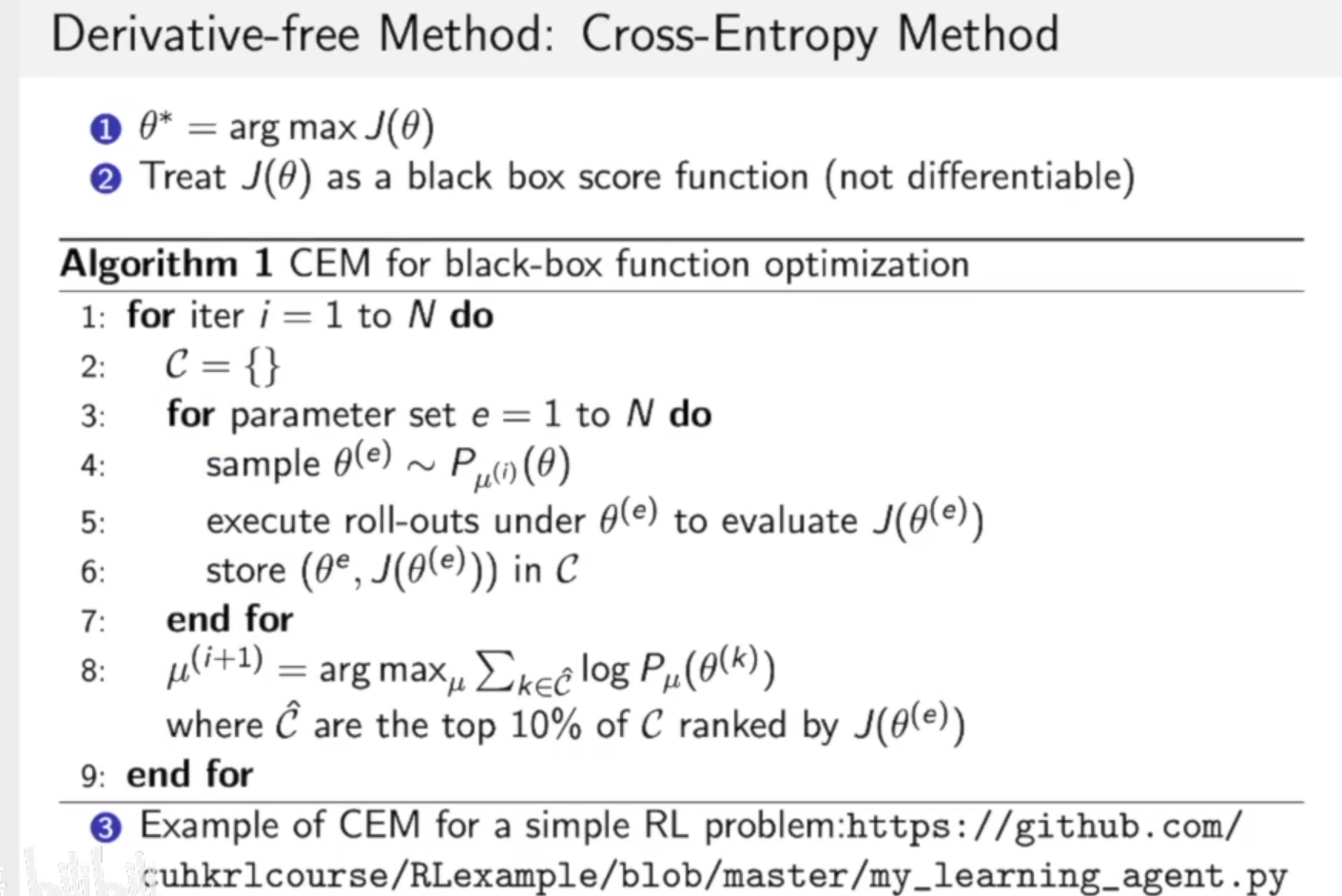
如果客观函数是不可导的,我们没法计算导数,这时候我们可以使用Derivative-free的方法,这里简要介绍两种。
Cross Entropy Method(CEM)
这种算法跟遗传算法类似,不断取前10%最优的参数对分布进行优化。
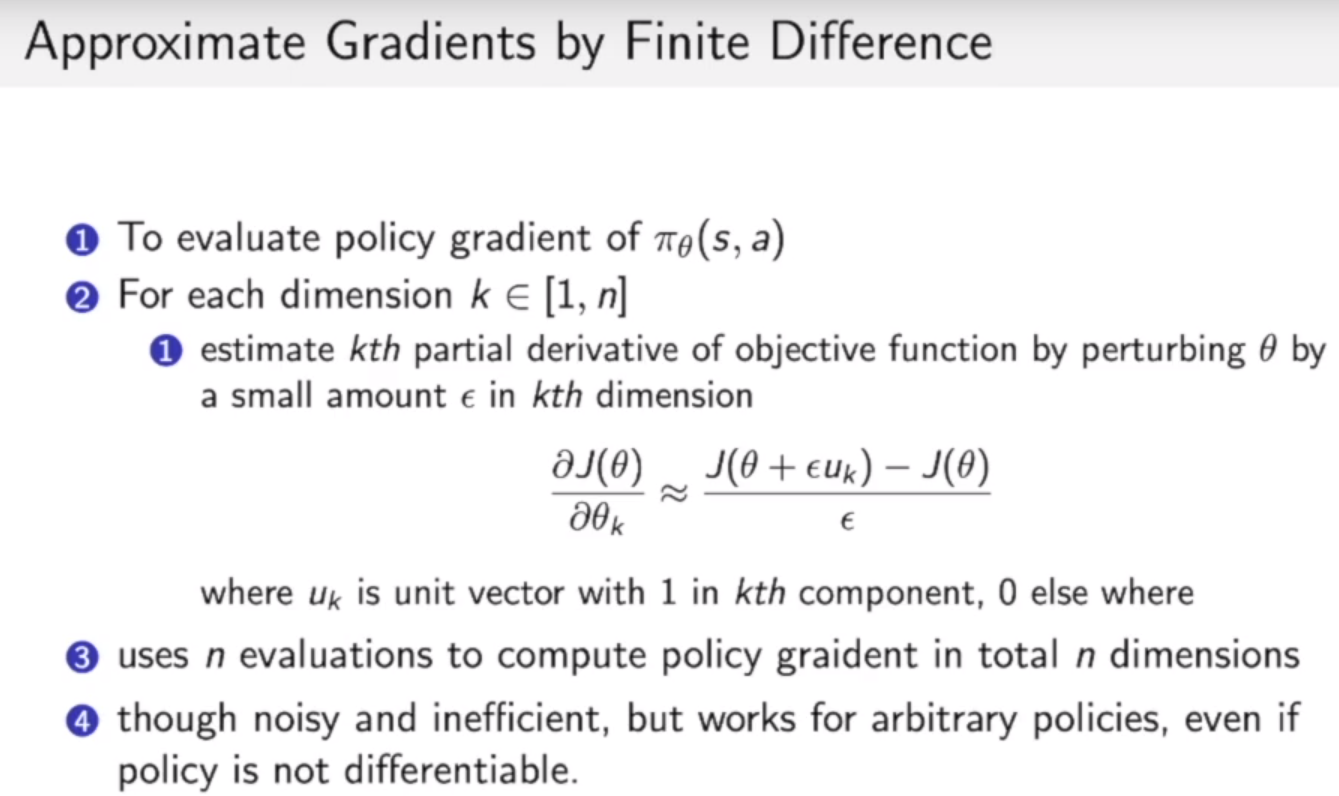
Finite Difference
我们可以加一个很小的扰动来观察J(θ)的变化来近似获取梯度。
Actor-Critic
此部分内容可以参考强化学习实战的连续动作空间上求解RL。这里用了DDPG的算法。
这里Actor-Critic也可以运用到上面的Policy Gradient中,Policy网络的更新方式中的Reward加权更新改变为 Reward - Critic 加权更新,也就是说当Reward 比Critic预测的程度高,我们趋向于采纳这种行为,反之摒弃这种行为。
拓展
我会根据上面的两条主线讲解相关算法,这些内容我会一个算法开一篇文章进行讲解。目前我已经写了以下文章:
Model-based RL
这部分内容我另外发了一篇文章:model-based强化学习入门
Imitation Learning
这部分内容我另外发了一篇文章:模仿学习(Imitation Learning)入门
Distributed RL
这部分内容我另外发了一篇文章:分布式强化学习


